วิธีนำทาง: เลเซอร์ SLAM
ความจุในการบรรทุก: 1000kg
รัศมีการเลี้ยว: 1600mm
ความสูงในการยก: ≤4000mm
ความเร็วในการเดิน: ≤1.2m/s
ความกว้างของฟอร์ค:280/750mm
แบตเตอรี่:แบตเตอรี่ลิเธียม
ขนาด: 2800*1700*2800mm
วิธีขับเคลื่อน: การขับเคลื่อนด้วยล้อเซอร์โว
วิธีชาร์จ: การชาร์จด้วยมือ/อัตโนมัติ
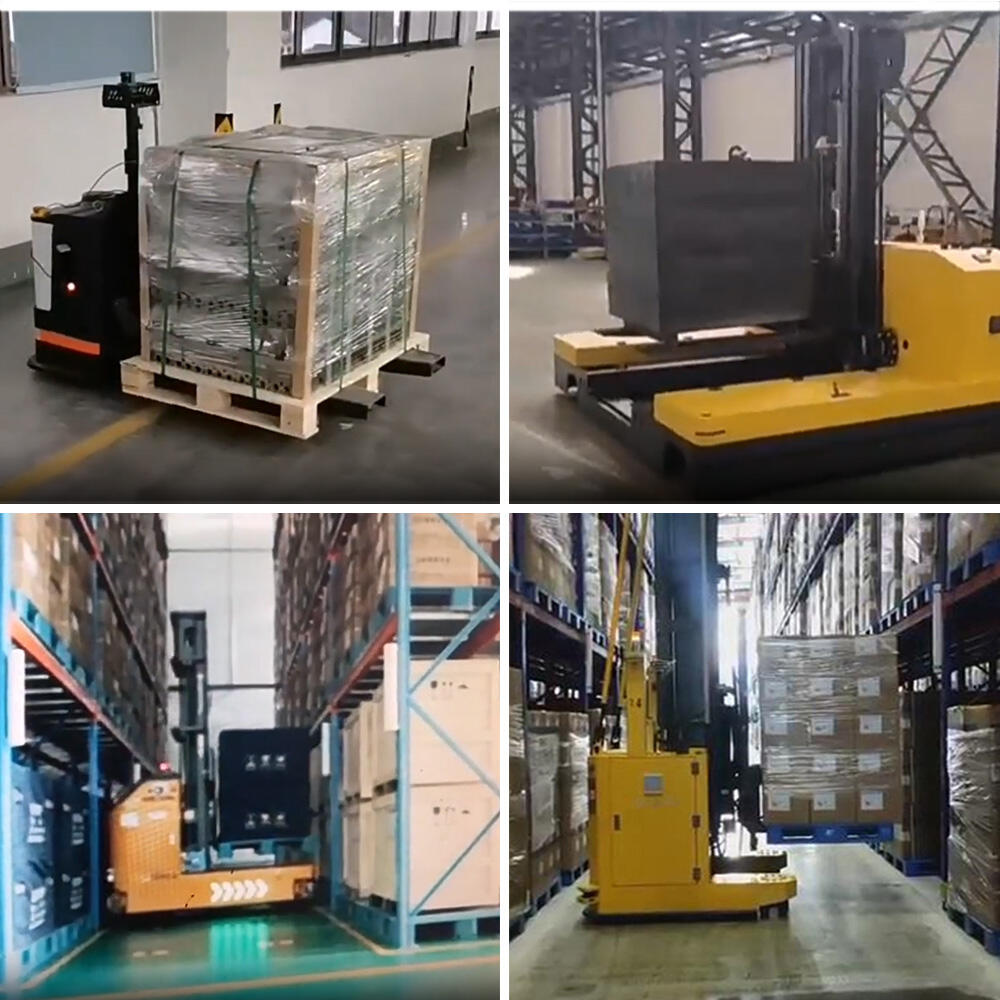
รถยกแบบ AGV ระบบเลเซอร์สแต็ค สามารถบรรทุกน้ำหนักได้ถึง 2000KG และยกของขึ้นได้สูงถึง 6000MM โดยอาศัยข้อมูลจากเซ็นเซอร์ LiDAR มาใช้งานในอัลกอริธึม SLAM เพื่อสร้างแผนที่และทำหน้าที่กำหนดตำแหน่งและการนำทางขณะที่หุ่นยนต์เคลื่อนที่ เทคโนโลยีนำทางด้วยเลเซอร์ขั้นสูงไม่จำเป็นต้องมีเครื่องหมายบนพื้นหรือแผ่นสะท้อนแสง หุ่นยนต์สามารถหยุดอัตโนมัติ/หลีกเลี่ยงสิ่งกีดขวางระหว่างการเคลื่อนที่ ใช้อ้อมากและวางของในตำแหน่งที่กำหนด นอกจากนี้ยังมีฟังก์ชันชาร์จไฟอัตโนมัติ หุ่นยนต์ออกแบบกลยุทธ์การป้องกันความปลอดภัยหลายระดับทั้งในด้านซอฟต์แวร์และฮาร์ดแวร์ มีสวิตช์ความปลอดภัยและปุ่มหยุดฉุกเฉินรอบตัวหุ่นยนต์เพื่อให้มั่นใจในความปลอดภัยและความเสถียรโดยรวม
| ลักษณะเฉพาะ | ประเภทของพลังงาน | ไฟฟ้า | |
| ประเภทการขับขี่ | อัตโนมัติ | ||
| โหมดการนำทาง | เลเซอร์ | ||
| ความจูง | Q (กก.) | 2000 | |
| ศูนย์กลางของน้ำหนักบรรทุก | C (mm) | 600 | |
| ระยะการบรรทุก | X (มม.) | 550 | |
| ระยะล้อ | Y (มม.) | 1180 | |
| ขนาดล้อขับเคลื่อน | (มม) | φ250*85 | |
| ขนาดล้อเสริม | (มม) | φ210*70 | |
| ความกว้างรางหน้า | b11 (มม.) | 2050 | |
| ขนาด | ความสูงรวม | h1 (มม.) | 2800 |
| ความสูงในการยก | h3 (มม.) | 6000 | |
| ความสูงของฟอร์ค (ที่ต่ำที่สุด) | h13 (มม.) | 60 | |
| ความยาวรวม | L1 (มม.) | 2800 | |
| ความยาวของรถ | L2 (มม.) | 540 | |
| ความกว้างโดยรวม | b1(มม.) | 1700 | |
| ขนาดฟอร์ค | s/e/l (มม.) | 45X140X1150 | |
| ความกว้างด้านนอกของฟอร์ค | b5 (มม.) | 280/750 | |
| ส้อมกวาด | L4 (มม.) | 1200 | |
| ความสะอาดจากพื้นดินขั้นต่ํา | m2(mm) | 60 | |
| ความกว้างช่องวางแบบมุมฉาก ถาดขนาด 1000x1200 มม. | Ast(มม.) | 1960 | |
| รัศมีวงเลี้ยว | Wa(มม.) | 1600 | |
| ประสิทธิภาพ | ความเร็วในการขับเคลื่อน ไม่มีภาระ/มีภาระเต็ม | กม./ชม. | 7/8 |
| ความเร็วในการยก ไม่มีภาระ/มีภาระเต็ม | มม./วินาที | 120/190 | |
| ความเร็วในการลดระดับ ไม่มีภาระ/มีภาระเต็ม | มม./วินาที | 190/170 | |
| ความเร็วในการเคลื่อนที่ข้างหน้า | มม./วินาที | 100/100 | |
| ความจุการปีนสูงสุด ตอนไม่มีโหลด/มีโหลดเต็ม | % | 3/3 | |
| วิธีการเบรก | เบรกแม่เหล็กไฟฟ้า | ||
| มอเตอร์ | กำลังมอเตอร์ขับเคลื่อน | กิโลวัตต์ | 1*2 |
| กำลังมอเตอร์พวงมาลัย | กิโลวัตต์ | 0.4*3 | |
| กำลังมอเตอร์สำหรับการยก | กิโลวัตต์ | 8.6 | |
| แรงดันไฟฟ้า/ความจุแบตเตอรี่ลิเธียม | V/AH | 48/210 | |
| น้ำหนักแบตเตอรี่ลิเธียม | กิโลกรัม | 150 | |
| รูปแบบการควบคุม | พวงมาลัยไฟฟ้า | ||
1. การกระจายวัสดุในโรงงานลดผู้ปฏิบัติงานในช่องทางของโรงงาน และสร้างโรงงานเคมีสีเขียว
2. การจัดเก็บในคลังสินค้าของโรงงานทำให้การเก็บรักษาเป็นระเบียบและมีระบบมากขึ้น ปรับปรุงการใช้พื้นที่และความรวดเร็วในการขนส่งอย่างเต็มที่






บริษัทผู้เชี่ยวชาญในการออกแบบ การผลิต และการขายเครื่องมือยกและระบบจ่ายพลังงาน
 EN
EN
 AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 SQ
SQ
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 BN
BN
 MN
MN
 KK
KK
 KY
KY






