Метод навигации: Лазер SLAM
Грузоподъемность: 1000кг
Радиус разворота: 1600мм
Высота подъема: ≤4000мм
Скорость движения: ≤1.2м/с
Ширина вил: 280/750мм
Батарея: литиевая батарея
Габариты: 2800*1700*2800мм
Способ движения: привод сервоприводным колесом
Метод зарядки: ручная/автоматическая зарядка
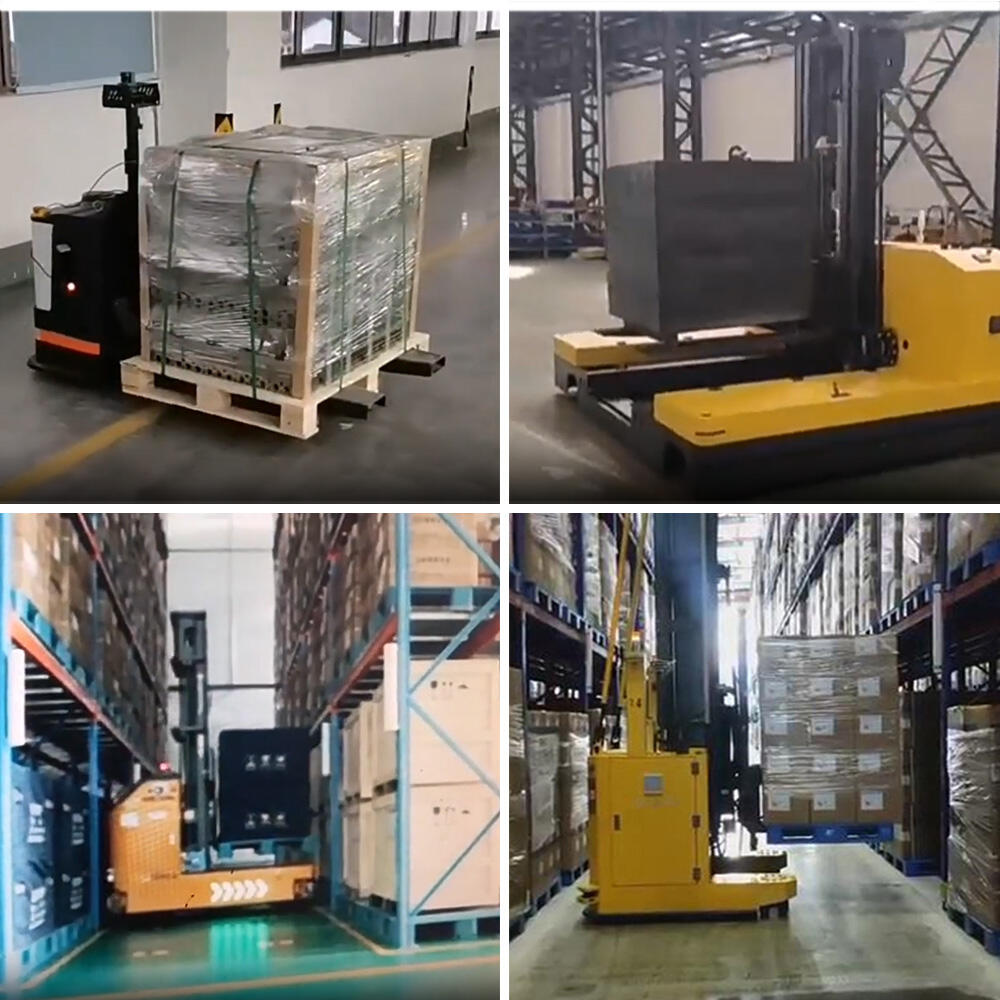
Штабелер на основе лазерного наведения AGV, с грузоподъемностью 2000 кг, может поднимать до 6000 мм. На основе данных, полученных от сенсоров LiDAR, используется алгоритм SLAM для построения карт и выполнения функций позиционирования и навигации во время движения робота. Продвинутая технология лазерной навигации не требует никаких маркировок на полу или отражающих панелей. Робот может автоматически останавливаться/обходить препятствия во время движения, захватывать товары вилами и размещать их в заданных местах. Комплектуется функцией автономной зарядки. В конструкции робота предусмотрено несколько стратегий защиты безопасности как на уровне программного обеспечения, так и аппаратного обеспечения, а также оснащен контактами безопасности и кнопками экстренной остановки вокруг робота для обеспечения общей безопасности и устойчивости.
| Характеристика | Тип мощности | Электрический | |
| Тип управления | Автоматическая | ||
| РЕЖИМ НАВИГАЦИИ | Лазер | ||
| Номинальная нагрузка | Q (кг) | 2000 | |
| Центр нагрузки | C (мм) | 600 | |
| Расстояние до груза | X (мм) | 550 | |
| Колесная база | Y (мм) | 1180 | |
| Размер приводного колеса | (мм) | φ250*85 | |
| Размер вспомогательного колеса | (мм) | φ210*70 | |
| Ширина передней колеи | b11 (мм) | 2050 | |
| Размер | Общая высота | h1 (мм) | 2800 |
| Высота подъема | h3 (мм) | 6000 | |
| Высота вилки (в нижнем положении) | h13 (мм) | 60 | |
| Общая длина | L1 (мм) | 2800 | |
| Длина транспортного средства | L2 (мм) | 540 | |
| Общая ширина | b1(мм) | 1700 | |
| Размер вилки | s/e/l (мм) | 45X140X1150 | |
| Внешняя ширина вил | b5 (мм) | 280/750 | |
| Наклон вилки | L4 (мм) | 1200 | |
| Минимальный клиренс | m2(мм) | 60 | |
| Ширина канала стекания под прямым углом, лоток 1000x1200мм | Ast(мм) | 1960 | |
| Радиус поворота | Wa(мм) | 1600 | |
| Производительность | Скорость движения без нагрузки/с полной нагрузкой | км/ч | 7/8 |
| Скорость подъема без нагрузки/с полной нагрузкой | мм/с | 120/190 | |
| Скорость опускания без нагрузки/с полной нагрузкой | мм/с | 190/170 | |
| Скорость вперед | мм/с | 100/100 | |
| Максимальная грузоподъемность при подъеме, пустой/с полной нагрузкой | % | 3/3 | |
| Метод торможения | Электромагнитный тормоз | ||
| Двигатель | Мощность двигателя привода | кВт | 1*2 |
| Мощность рулевого мотора | кВт | 0.4*3 | |
| Мощность двигателя подъема | кВт | 8.6 | |
| Напряжение/емкость литиевой батареи | В/Ач | 48/210 | |
| Вес литиевой батареи | кг | 150 | |
| Режим рулевого управления | Электронное рулевое управление | ||
1. Распределение материалов в цехе, сокращение операторов проходов цеха и создание экологически чистого химического завода.
2. Складирование на складах завода делает хранение более стандартизованным и упорядоченным, полностью повышая использование пространства и эффективность транспортировки.






Профессиональное предприятие, занимающееся проектированием, производством и продажей подъемных инструментов и систем электропитания.
 EN
EN
 AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 SQ
SQ
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 BN
BN
 MN
MN
 KK
KK
 KY
KY






