Método de Navegação: Laser SLAM
Capacidade de Carga: 1000kg
Raio de Giro: 1600mm
Altura de Elevação: ≤4000mm
Velocidade de Deslocamento: ≤1.2m/s
Largura da Garfo: 280/750mm
Bateria: Bateria de Lítio
Dimensões: 2800*1700*2800mm
Método de Direção: Direção por servo roda
Método de Carregamento: Carregamento manual/automático
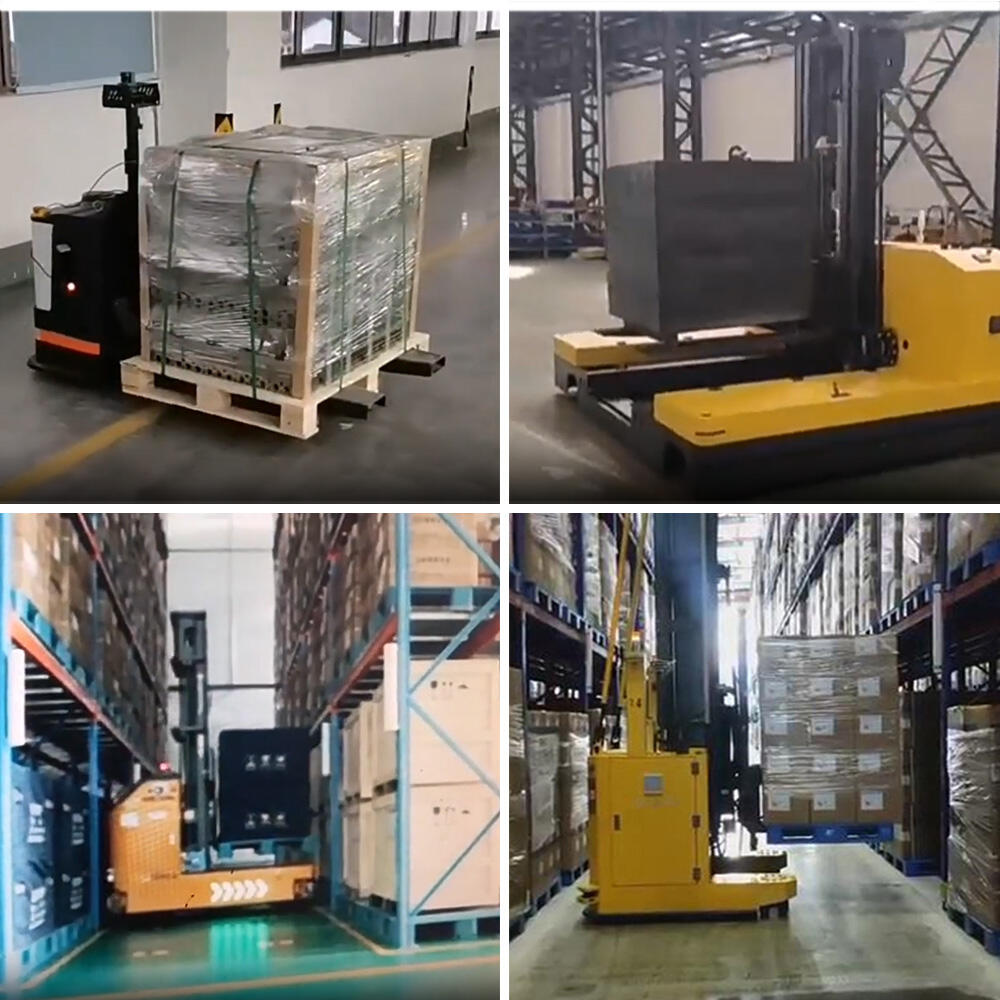
Empilhadeira AGV a laser, com uma carga de 2000KG, pode levantar até 6000MM. Com base nos dados obtidos pelos sensores LiDAR, o algoritmo SLAM é usado para construir mapas e realizar funções de posicionamento e navegação durante o movimento do robô. A tecnologia avançada de navegação a laser não requer nenhuma marcação no chão ou painéis refletores. O robô pode parar automaticamente/evitar obstáculos durante seu movimento, empilhar mercadorias e colocá-las em locais designados. Equipado com função de recarga autônoma. O robô projeta múltiplas estratégias de proteção de segurança em termos de software e hardware, e está equipado com contatos de segurança e botões de parada de emergência ao redor do robô para garantir a segurança e estabilidade totais.
| Característica | Tipo de potência | Elétrico | |
| Tipo de acionamento | Automático | ||
| MODO DE NAVEGAÇÃO | Laser | ||
| Carga nominal | Q (kg) | 2000 | |
| Centro de carga | C (mm) | 600 | |
| Distância de carga | X (mm) | 550 | |
| Distância entre eixos | Y (mm) | 1180 | |
| Tamanho da Roda de Tração | (mm) | φ250*85 | |
| Tamanho da Roda Auxiliar | (mm) | φ210*70 | |
| Largura da Esteira Dianteira | b11 (mm) | 2050 | |
| Tamanho | Altura Total | h1 (mm) | 2800 |
| Altura de levantamento | h3 (mm) | 6000 | |
| Altura da Forquilha (na posição mais baixa) | h13 (mm) | 60 | |
| Comprimento Total | L1 (mm) | 2800 | |
| Comprimento do veículo | L2 (mm) | 540 | |
| Largura total | b1(mm) | 1700 | |
| Tamanho do garfo | s/e/l (mm) | 45X140X1150 | |
| Largura externa da garra | b5 (mm) | 280/750 | |
| Inclinação da Forquilha | L4 (mm) | 1200 | |
| Altura mínima do solo | m2(mm) | 60 | |
| Largura do Canal de Empilhamento em Ângulo Reto, Bandeja 1000x1200mm | Ast(mm) | 1960 | |
| Raio de giro | Wa(mm) | 1600 | |
| Desempenho | Velocidade de Tração Sem Carga/Com Carga Total | km/h | 7/8 |
| Velocidade de Elevação Sem Carga/Com Carga Total | mM/S | 120/190 | |
| Velocidade de Descida Sem Carga/Com Carga Total | mM/S | 190/170 | |
| Velocidade para a frente | mM/S | 100/100 | |
| Capacidade Máxima de Subida Vazia/Com Carga Total | % | 3/3 | |
| Método de frenagem | Freio eletromagnético | ||
| Motor | Potência do motor | kW | 1*2 |
| Potência do Motor de Direção | kW | 0.4*3 | |
| Potência do motor de elevação | kW | 8.6 | |
| Voltagem/Capacidade da Bateria de Lítio | V/AH | 48/210 | |
| Peso da Bateria de Lítio | kg | 150 | |
| Modo de direcção | Direção eletrônica | ||
1.Distribuição de materiais no taller, reduzindo operadores nos corredores do taller e criando uma fábrica química verde.
2.A empilhagem dos armazéns da fábrica torna o armazenamento mais padronizado e organizado, melhorando plenamente a utilização do espaço e a eficiência de transporte.






Uma empresa profissional dedicada ao design, fabricação e vendas de ferramentas de içamento e sistemas de fornecimento de energia.
 EN
EN
 AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 SQ
SQ
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 BN
BN
 MN
MN
 KK
KK
 KY
KY






