Méthode de navigation : Laser SLAM
Capacité de charge : 1000kg
Rayon de braquage : 1600mm
Hauteur de levée : ≤4000mm
Vitesse de déplacement : ≤1.2m/s
Largeur de la fourche : 280/750mm
Batterie : batterie lithium
Dimensions : 2800*1700*2800mm
Méthode de conduite : Servo roue motrice
Méthode de recharge : Recharge manuelle/automatique
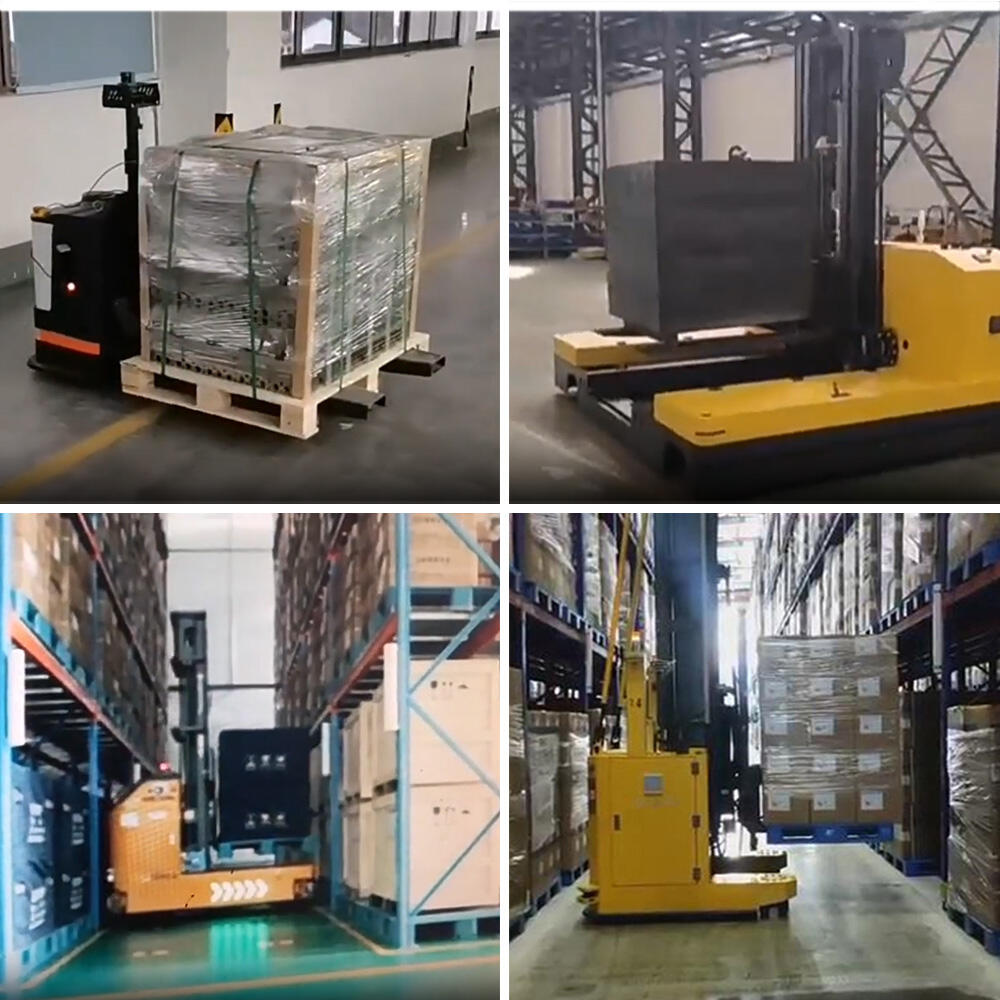
chariot élévateur AGV à pile laser, avec une charge de 2000KG, peut s'élever jusqu'à 6000MM. Sur la base des données obtenues par les capteurs LiDAR, l'algorithme SLAM est utilisé pour construire des cartes et effectuer des fonctions de positionnement et de navigation lors du mouvement du robot. La technologie avancée de navigation laser n'a pas besoin de marques au sol ou de panneaux réfléchissants. Le robot peut s'arrêter automatiquement/éviter les obstacles pendant son mouvement, fourcher les marchandises et les déposer dans des emplacements désignés. Il est équipé d'une fonction de recharge autonome. Le robot conçoit plusieurs stratégies de protection de sécurité en termes de logiciel et de matériel, et est équipé de contacts de sécurité et de boutons d'arrêt d'urgence autour du robot pour garantir la sécurité et la stabilité globales.
| Caractéristique | Type de puissance | Électrique | |
| Type de conduite | Automatique | ||
| MODE DE NAVIGATION | Laser | ||
| Charge nominale | Q (kg) | 2000 | |
| Centre de charge | C (mm) | 600 | |
| Distance de charge | X (mm) | 550 | |
| Empattement | Y (mm) | 1180 | |
| Taille de la roue motrice | (mm) | φ250*85 | |
| Taille de la roue auxiliaire | (mm) | φ210*70 | |
| Largeur de voie avant | b11 (mm) | 2050 | |
| Taille | Hauteur totale | h1 (mm) | 2800 |
| Hauteur de levage | h3 (mm) | 6000 | |
| Hauteur de fourche (au plus bas) | h13 (mm) | 60 | |
| Longueur totale | L1 (mm) | 2800 | |
| Longueur du véhicule | L2 (mm) | 540 | |
| Largeur totale | b1(mm) | 1700 | |
| Taille de la fourchette | s/e/l (mm) | 45X140X1150 | |
| Largeur extérieure des fourches | b5 (mm) | 280/750 | |
| Inclinaison de la fourche | L4 (mm) | 1200 | |
| Dégagement au sol minimum | m2(mm) | 60 | |
| Largeur du canal d'empilement à angle droit, plateau 1000x1200 mm | Ast(mm) | 1960 | |
| Rayon de braquage | Wa(mm) | 1600 | |
| Performance | Vitesse de conduite sans charge/avec charge | km/h | 7/8 |
| Vitesse de levage sans charge/avec charge | mm/s | 120/190 | |
| Vitesse de descente sans charge/avec charge | mm/s | 190/170 | |
| Vitesse en avant | mm/s | 100/100 | |
| Capacité maximale de montée Sans charge/Charge complète | % | 3/3 | |
| Méthode de freinage | Frein électromagnétique | ||
| Moteur | Puissance du moteur de traction | kW | 1*2 |
| Puissance du moteur de direction | kW | 0.4*3 | |
| Puissance du moteur de levage | kW | 8.6 | |
| Tension/Capacité de la batterie au lithium | V/AH | 48/210 | |
| Poids de la batterie lithium | kg | 150 | |
| Mode de direction | Direction assistée électronique | ||
1. Distribution des matériaux d'atelier, réduction du nombre d'opérateurs dans les allées de l'atelier, et création d'une usine chimique verte.
2. L'empilement dans les entrepôts de l'usine rend le stockage plus normalisé et ordonné, améliorant pleinement l'utilisation de l'espace et l'efficacité du transport.






Entreprise spécialisée dans la conception, la fabrication et la vente d'outils de levage et de systèmes d'alimentation électrique.
 EN
EN
 AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 SQ
SQ
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 BN
BN
 MN
MN
 KK
KK
 KY
KY






