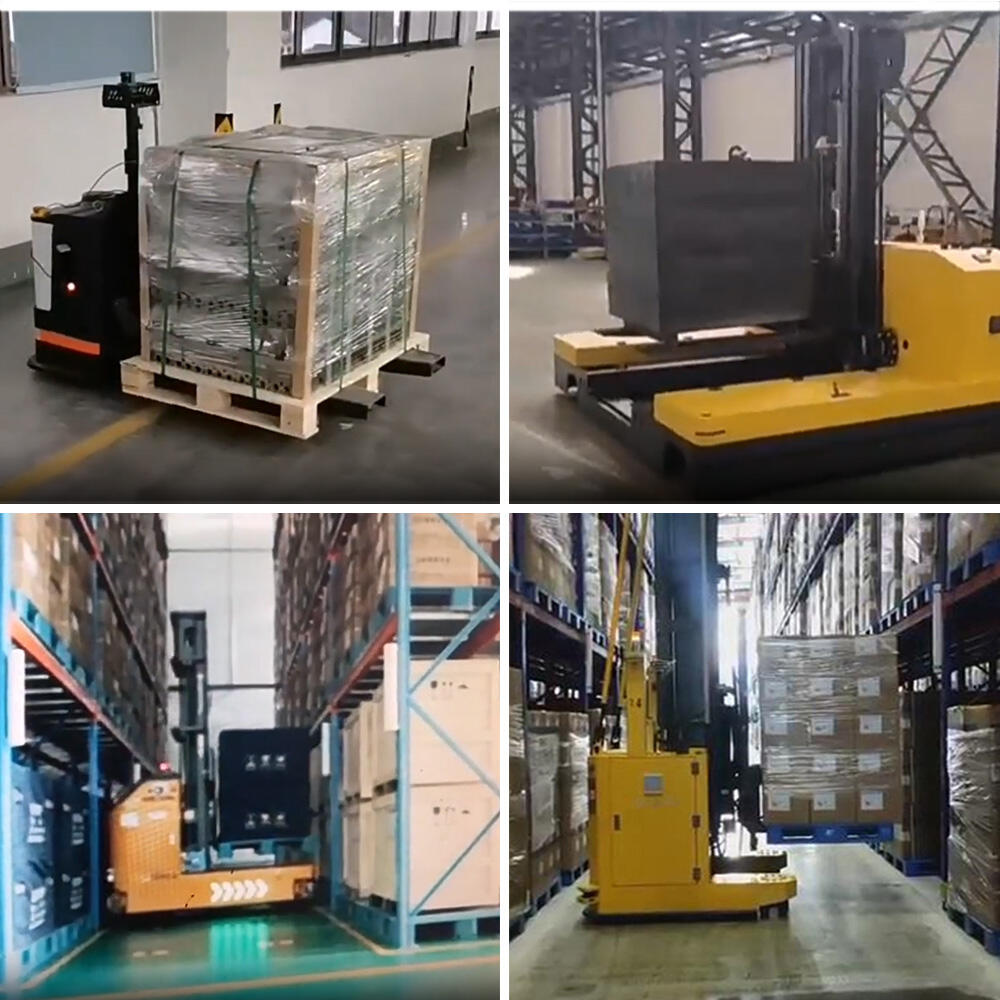
Navigační metoda: Laser SLAM
Nosnost: 1000kg
Otočný poloměr: 1600mm
Zdvihací výška: ≤4000mm
Chůze rychlost: ≤1.2m/s
Šířka vidlic: 280/750mm
Baterie: Lithium battery
Rozměry: 2800*1700*2800mm
Způsob pohybu: Pohon servokolem
Metoda nabíjení: Ruce/nabíjení automaticky
Laserový vysokozdvižný forklift AGV s nákladem 2000KG může zdvihnout až do výšky 6000MM. Na základě dat získaných z LiDAR senzorů se používá SLAM algoritmus pro tvorbu map a provádění funkcí pozice a navigace během pohybu robota. Pokročilá laserová navigační technologie nepotřebuje žádné označení na podlaze ani odrazové panely. Během pohybu může robot automaticky zastavit/vyhýbat se překážkám, zašlapovat zboží a umisťovat je do určených lokací. Je vybaven funkcí autonomního nabíjení. V oblasti softwaru i hardwaru navrhuje robot více strategií ochranného systému a je vybaven bezpečnostními kontaktory a tlačítky nouzového zastavení kolem robota pro zajištění celkové bezpečnosti a stability.
| Charakteristika | Typ pohonu | Elektrické | |
| Typ vozidla | Automatický | ||
| REŽIM NAVEGACE | Laser | ||
| Jmenovitý náklad | Q (kg) | 2000 | |
| Úložný střed | C (mm) | 600 | |
| Odstup od zatížení | X (mm) | 550 | |
| Rozvor | Y (mm) | 1180 | |
| Velikost hnacího kola | (mm) | φ250*85 | |
| Velikost pomocného kola | (mm) | φ210*70 | |
| Šířka přední kolejnice | b11 (mm) | 2050 | |
| Velikost | Celková výška | h1 (mm) | 2800 |
| Výška zvedání | h3 (mm) | 6000 | |
| Výška vidlice (v nejnižším postavení) | h13 (mm) | 60 | |
| Celková délka | L1 (mm) | 2800 | |
| Délka vozidla | L2 (mm) | 540 | |
| Celková šířka | b1 (mm) | 1700 | |
| Velikost vidličky | s/e/l (mm) | 45X140X1150 | |
| Venkovní šířka vidlic | b5 (mm) | 280/750 | |
| Vilová vidlice | L4 (mm) | 1200 | |
| Minimální světlá výška | m2(mm) | 60 | |
| Šířka kanálu pro zásobníkové uskladňování v pravém úhlu, podnos 1000x1200mm | Ast(mm) | 1960 | |
| Otočný poloměr | Wa(mm) | 1600 | |
| Výkon | Rychlost jízdy bez zátěže/plná zátěž | km/h | 7/8 |
| Rychlost zvedání bez zátěže/plná zátěž | mM/S | 120/190 | |
| Rychlost snižování bez zátěže/plná zátěž | mM/S | 190/170 | |
| Rychlost vpřed | mM/S | 100/100 | |
| Maximální nosnost při prázdném/nabitém nákladu | % | 3/3 | |
| Způsob brzdění | Elektromagnetické brzdy | ||
| Motor | Výkon pohonového motoru | kW | 1*2 |
| Výkon řídícího motoru | kW | 0.4*3 | |
| Výkon zvedacího motoru | kW | 8.6 | |
| Napětí/kapacita litiové baterie | V/AH | 48/210 | |
| Váha litiové baterie | kg | 150 | |
| Režim řízení | Elektronické řízení | ||
1. Distribuce materiálů v dílně, snížení počtu operátorů v uličkách dílny a vytvoření ekologické chemické továrny.
2. Nasazování skladů ve fabrice, což činí skladování standardizovanějším a uspořádanějším, plně zvyšuje využití prostoru a efektivitu dopravy.





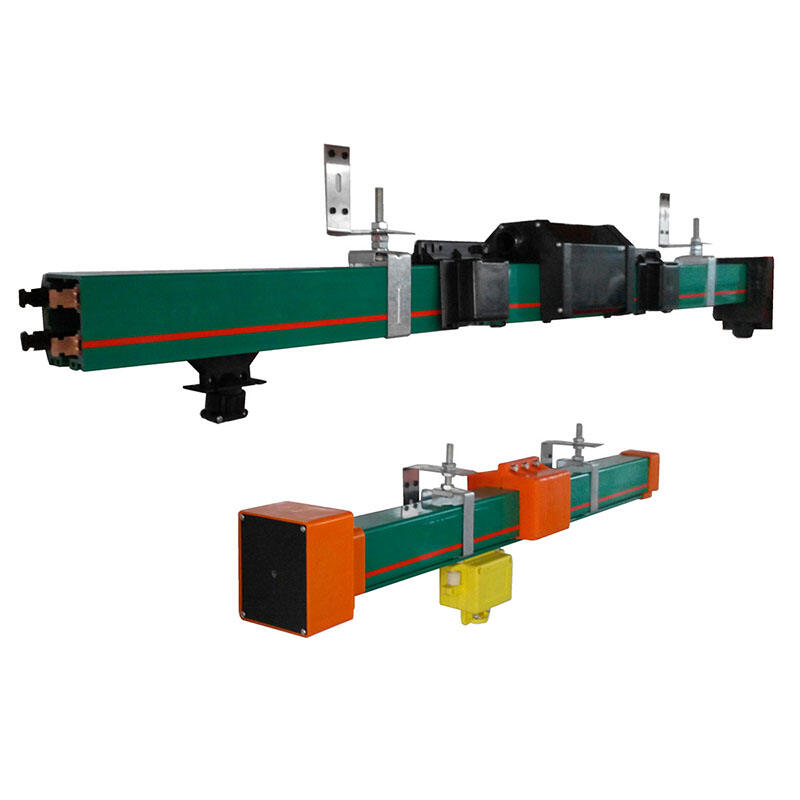

Profesionální společnost zabývající se návrhem, výrobou a prodejem zvedacích nástrojů a napájecích systémů.
 EN
EN
 AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 SQ
SQ
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 BN
BN
 MN
MN
 KK
KK
 KY
KY






