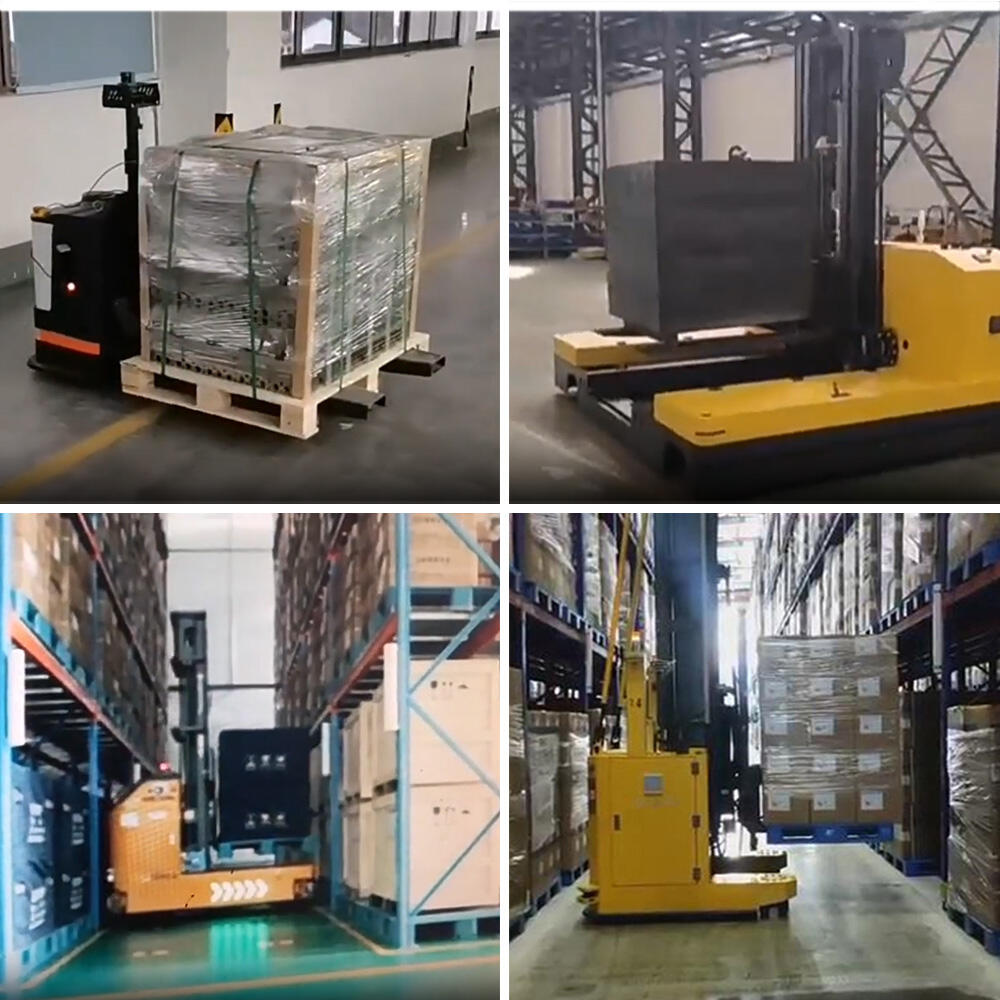
레이저 스택 포클리프 AGV는 2000KG의 하중을 가지며 최대 6000MM까지 들어 올릴 수 있습니다. LiDAR 센서에서 얻은 데이터를 기반으로 SLAM 알고리즘이 로봇 이동 중에 지도를 구성하고 위치 및 항법 기능을 수행합니다. 고급 레이저 내비게이션 기술은 바닥에 표시나 반사 패널이 필요하지 않습니다. 로봇은 이동 중 자동으로 장애물을 멈추거나 회피하며, 상품을 포크하여 지정된 위치에 배치할 수 있습니다. 자율 충전 기능이 탑재되어 있으며, 소프트웨어와 하드웨어 측면에서 다수의 보안 보호 전략을 설계하였고, 로봇 주변에는 안전 접점과 응급 정지 버튼이 설치되어 전체적인 안전성과 안정성을 확보합니다.
| 특징 | 파워 타입 | 전기 | |
| 드라이브 유형 | 자동 | ||
| 내비게이션 모드 | 레이저 | ||
| 부하량 | Q (kg) | 2000 | |
| 하중 중심 | C (mm) | 600 | |
| 하중 거리 | X (mm) | 550 | |
| 휠베이스 | Y (mm) | 1180 | |
| 구동 휠 크기 | (mm) | φ250*85 | |
| 보조 휠 크기 | (mm) | φ210*70 | |
| 앞 트랙 너비 | b11 (mm) | 2050 | |
| 크기 | 전고 | h1 (mm) | 2800 |
| 리프팅 높이 | h3 (mm) | 6000 | |
| 포크 높이 (가장 낮을 때) | h13 (mm) | 60 | |
| 전장 | L1 (mm) | 2800 | |
| 차량 길이 | L2 (mm) | 540 | |
| 전체 너비 | b1(mm) | 1700 | |
| 포크 크기 | s/e/l (mm) | 45X140X1150 | |
| 포크 외부 너비 | b5 (mm) | 280/750 | |
| 포크 레이크 | L4 (mm) | 1200 | |
| 최소 지상 간격 | m2(mm) | 60 | |
| 오른쪽 각도 스택킹 채널 너비, 트레이 1000x1200mm | Ast(mm) | 1960 | |
| 회전 반경 | Wa(mm) | 1600 | |
| 성능 | 공회전 시/만재 시 주행 속도 | km/h | 7/8 |
| 공회전 시/만재 시 리프팅 속도 | 월/월 | 120/190 | |
| 공회전 시/만재 시 저리фт 속도 | 월/월 | 190/170 | |
| 전진 속도 | 월/월 | 100/100 | |
| 최대 등반 능력 (공차/만차) | % | 3/3 | |
| 제동 방식 | 전자자기식 브레이크 | ||
| 모터 | 구동 모터 출력 | kW | 1*2 |
| 스티어링 모터 파워 | kW | 0.4*3 | |
| 승강 모터 출력 | kW | 8.6 | |
| 리튬 배터리 전압/용량 | V/ah | 48/210 | |
| 리튬 배터리 무게 | 킬로그램 | 150 | |
| 스티어링 모드 | 전자 조향 | ||
1. 작업장 자재 배포, 작업장 통로 운영자 감소 및 녹색 화학 공장 구축.
2. 공장 창고의 적층으로 물류가 더욱 표준화되고 체계화되어 공간 활용도와 운송 효율성이 크게 향상되었습니다.

설계, 제조 및 판매에 종사하는 전문 기업입니다.
 EN
EN
 AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 SQ
SQ
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 BN
BN
 MN
MN
 KK
KK
 KY
KY