ナビゲーション方式:レーザーSLAM
積載容量: 1000kg
回転半径: 1600mm
リフト高さ: ≤4000mm
移動速度: ≤1.2m/s
フォーク幅:280/750mm
バッテリー:リチウム電池
サイズ: 2800*1700*2800mm
駆動方式: サーボホイール駆動
充電方法:手動/自動充電
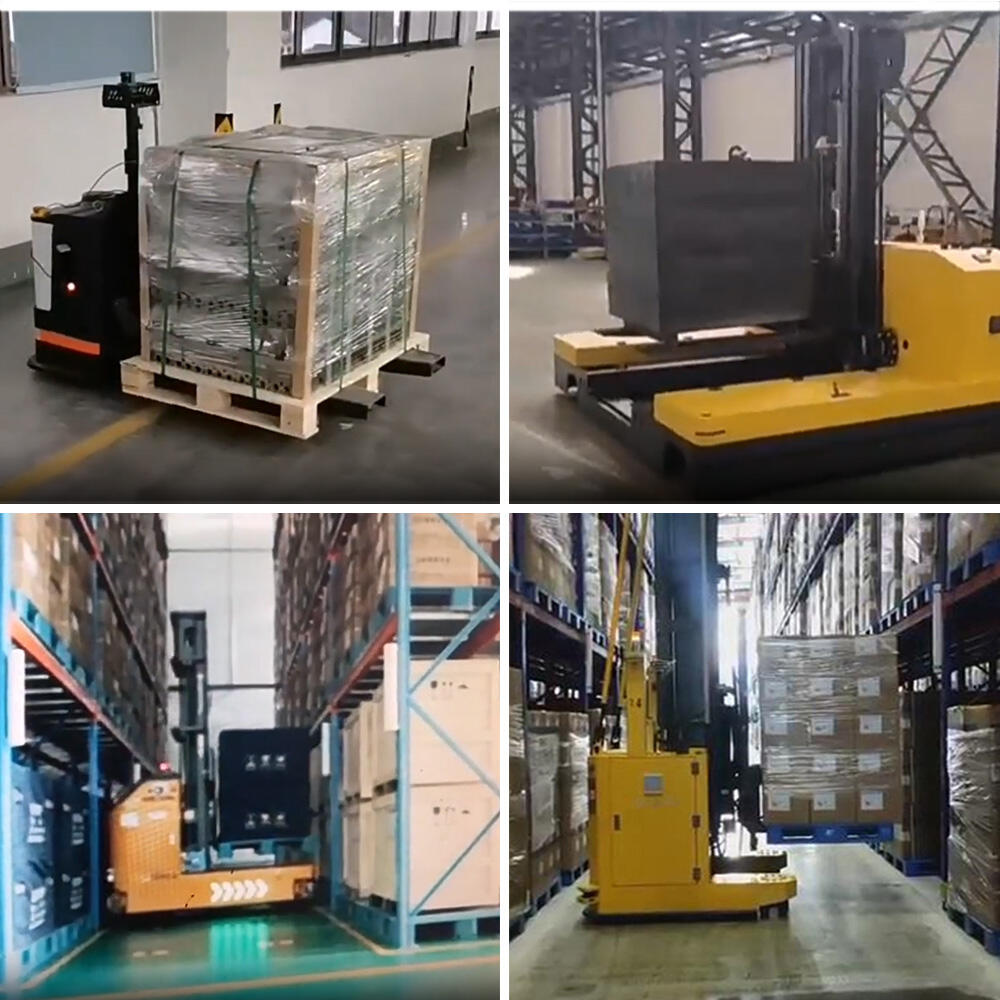
レーザースタックフォークリフトAGVは、2000KGの荷重があり、最大6000MMまで持ち上げることができます。LiDARセンサーから得られたデータに基づき、SLAMアルゴリズムを使用して地図を作成し、ロボットの移動中に位置特定とナビゲーション機能を実行します。先進的なレーザーナビゲーション技術は、地面にマーカーを設置する必要も反射板を設置する必要もありません。ロボットは移動中に自動的に障害物を停止または回避し、商品をフォークで取り扱い、指定された場所に配置することができます。自律充電機能が搭載されています。ロボットはソフトウェアおよびハードウェアの面で複数のセキュリティ保護戦略を設計しており、ロボット周辺には安全接触装置と緊急停止ボタンが装備されており、全体の安全性と安定性を確保します。
| 特徴 | 電源タイプ | 電動 | |
| 運転タイプ | 自動 | ||
| NAVIGATION MODE | レーザー | ||
| 定数負荷 | Q (kg) | 2000 | |
| 荷重中心 | C (mm) | 600 | |
| 積載距離 | X (mm) | 550 | |
| ホイールベース | Y (mm) | 1180 | |
| 駆動輪サイズ | (mm) | φ250*85 | |
| 補助輪サイズ | (mm) | φ210*70 | |
| 前トレッド幅 | b11 (mm) | 2050 | |
| サイズ | 全高 | h1 (mm) | 2800 |
| 持ち上げ高さ | h3 (mm) | 6000 | |
| フォーク高さ(最低位置で) | h13 (mm) | 60 | |
| 全長 | L1 (mm) | 2800 | |
| 車両の長さ | L2 (mm) | 540 | |
| 全幅 | b1(mm) | 1700 | |
| フォークサイズ | s/e/l (mm) | 45X140X1150 | |
| フォーク外幅 | b5 (mm) | 280/750 | |
| フォークリフトのラック | L4 (mm) | 1200 | |
| 最小地上高 | m2(mm) | 60 | |
| 右角スタッキングチャネル幅、トレイ 1000x1200mm | アスト(mm) | 1960 | |
| ターニング半径 | ワ(mm) | 1600 | |
| パフォーマンス | 空荷/満荷時の走行速度 | km/h | 7/8 |
| 空荷/満荷時の揚昇速度 | mM/S | 120/190 | |
| 空荷/満荷時の降下速度 | mM/S | 190/170 | |
| 前進速度 | mM/S | 100/100 | |
| 最大空荷・満載登坂能力 | % | 3/3 | |
| ブレーキ方式 | 電磁ブレーキ | ||
| モーター | 駆動モーター出力 | kW | 1*2 |
| 操舵モーター出力 | kW | 0.4*3 | |
| 起力エンジン | kW | 8.6 | |
| リチウム電池電圧/容量 | V/AH | 48/210 | |
| リチウム電池重量 | 体重 | 150 | |
| ステアリングモード | 電子操舵 | ||
1. ワークショップでの材料配布、作業者数の削減、およびグリーン化学工場の創出。
2. 工場倉庫の積み重ねにより、保管がより標準化され秩序立てられ、スペースの利用率と輸送効率が大幅に向上します。

リフティングツールおよび電源システムの設計、製造、販売に従事する専門企業です。
 EN
EN
 AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 SQ
SQ
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 BN
BN
 MN
MN
 KK
KK
 KY
KY