Navigointimenetelmä: Laser SLAM
Kantokyky: 1000kg
Kääntöraadius: 1600mm
Nouseva korkeus: ≤4000mm
Kävelynopeus: ≤1.2m/s
Laukun leveys: 280/750mm
Akku: litiumakku
Mitatoja: 2800*1700*2800mm
Ajomalli: Servo pyöräajo
Latausmenetelmä: Käsinkirjoittaminen/automaattinen lataus
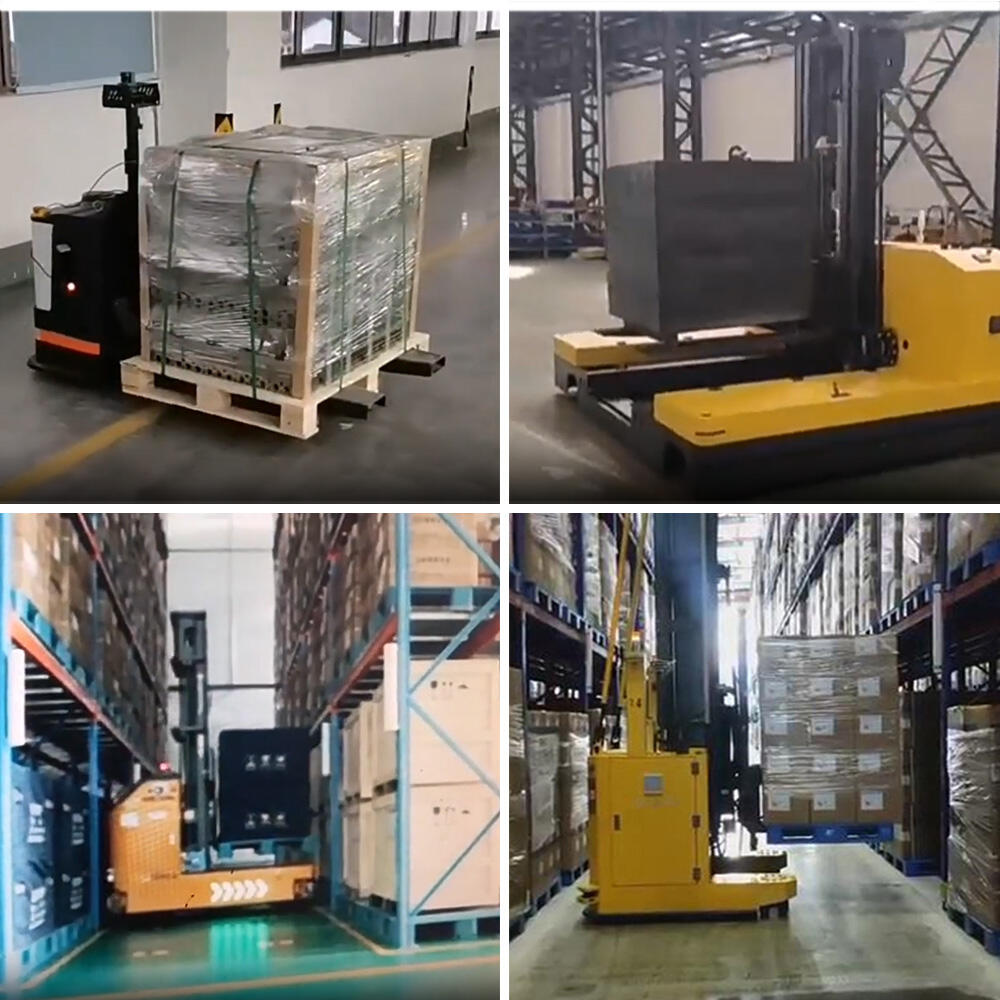
Laserstackepullonkeli AGV, jonka kuorma on 2000KG, voi nostaa korkeintaan 6000MM. LiDAR-sensorien antamien tietojen perusteella käytetään SLAM-algoritmia karttojen luomiseen sekä paikannus- ja navigointitoiminnoiden suorittamiseen robottien liikkenä. Järjestelmässä käytettävä edistyksellinen laserpaikannusteknologia ei vaadi merkintöjä maastossa tai heijastinpaneleja. Robotti pystyy pysähtymään/ohitsemaan esteitä aikanaan, kantamaan tavaroita ja asettamaan ne määritellyihin sijainteihin. Sen varusteluun kuuluu itsenäinen lataustoiminto. Robotti toteuttaa useita turvallisuussuojatoimenpiteitä sekä ohjelmistolla että laitteistolla, ja sen ympärillä on turvallisuuskontakteja ja hätäpysäyttimet varmistaakseen kokonaisuudessaan turvallisuuden ja vakauden.
| Ominaisuus | Tehotyyppi | Sähköinen | |
| Ajojen tyyppi | Automaattinen | ||
| NEUVOLAMALLI | Laseri | ||
| Arvioitu kuorma | Q (kg) | 2000 | |
| Kuormituskeskus | C (mm) | 600 | |
| Kuormitusmatka | X (mm) | 550 | |
| Akseliväli | Y (mm) | 1180 | |
| Ajojäätteen koko | (mm) | φ250*85 | |
| Avustajajäätteen koko | (mm) | φ210*70 | |
| Edessä olevan jälkimennen leveys | b11 (mm) | 2050 | |
| Koko | Kokonaiskorkeus | h1 (mm) | 2800 |
| Nostokoko | h3 (mm) | 6000 | |
| Vidin korkeus (alimmillaan) | h13 (mm) | 60 | |
| Kokonaispituus | L1 (mm) | 2800 | |
| Ajoneuvon pituus | L2 (mm) | 540 | |
| Kokonaisleveys | b1 (mm) | 1700 | |
| Varsi | s/e/l (mm) | 45X140X1150 | |
| Paalan uloleveys | b5 (mm) | 280/750 | |
| Vidin hiekkaulottelu | L4 (mm) | 1200 | |
| Minimimaavara | m2(mm) | 60 | |
| Suorakulmainen pinoamiskanavan leveys, laakeri 1000x1200mm | Ast(mm) | 1960 | |
| Kiertolähde | Wa(mm) | 1600 | |
| Suorituskyky | Ajo-nopeus ilman kuormaa/täyskuormassa | km/h | 7/8 |
| Nosto-nopeus ilman kuormaa/täyskuormassa | mm/s | 120/190 | |
| Lasku-nopeus ilman kuormaa/täyskuormassa | mm/s | 190/170 | |
| Edessä oleva nopeus | mm/s | 100/100 | |
| Suurin nousukapasiteetti tyhjässä/täydellisessä kuormassa | % | 3/3 | |
| Jarrutusmenetelmä | Elektromagnetinen jarru | ||
| Moottori | Moottorin teho | kW | 1*2 |
| Ohjausmoottorin teho | kW | 0.4*3 | |
| Korotusmoottorin teho | kW | 8.6 | |
| Litiumakun jännite/kapasiteetti | V/AH | 48/210 | |
| Litiumakun paino | kilo | 150 | |
| Ohjaustila | Sähköinen ohjaus | ||
1. Työpajamateriaalin jakelu, vähentäminen työpajan käytävien operaattoreita ja luominen vihreä kemikaalitehdas.
2. Tehtaiden varastojen pinoaminen tekee varastointiosta standardoituempaa ja järjestelmällisempää, parantaa tilan hyödyntämistä ja kuljetuseffektiivisuutta.






Ammattimainen yritys, joka keskittyy nostojärjestelmien ja virtajärjestelmien suunnitteluun, valmistukseen ja myyntiin.
 EN
EN
 AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 SQ
SQ
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 BN
BN
 MN
MN
 KK
KK
 KY
KY






