Navigationsmethode: Laser SLAM
Tragfähigkeit: 1000kg
Drehradius: 1600mm
Hebehöhe: ≤4000mm
Ganggeschwindigkeit: ≤1.2m/s
Gabelbreite: 280/750mm
Batterie: Lithiumbatterie
Abmessungen: 2800*1700*2800mm
Fahrweise: Servorad-Antrieb
Lademethode: Manuell/automatisch laden
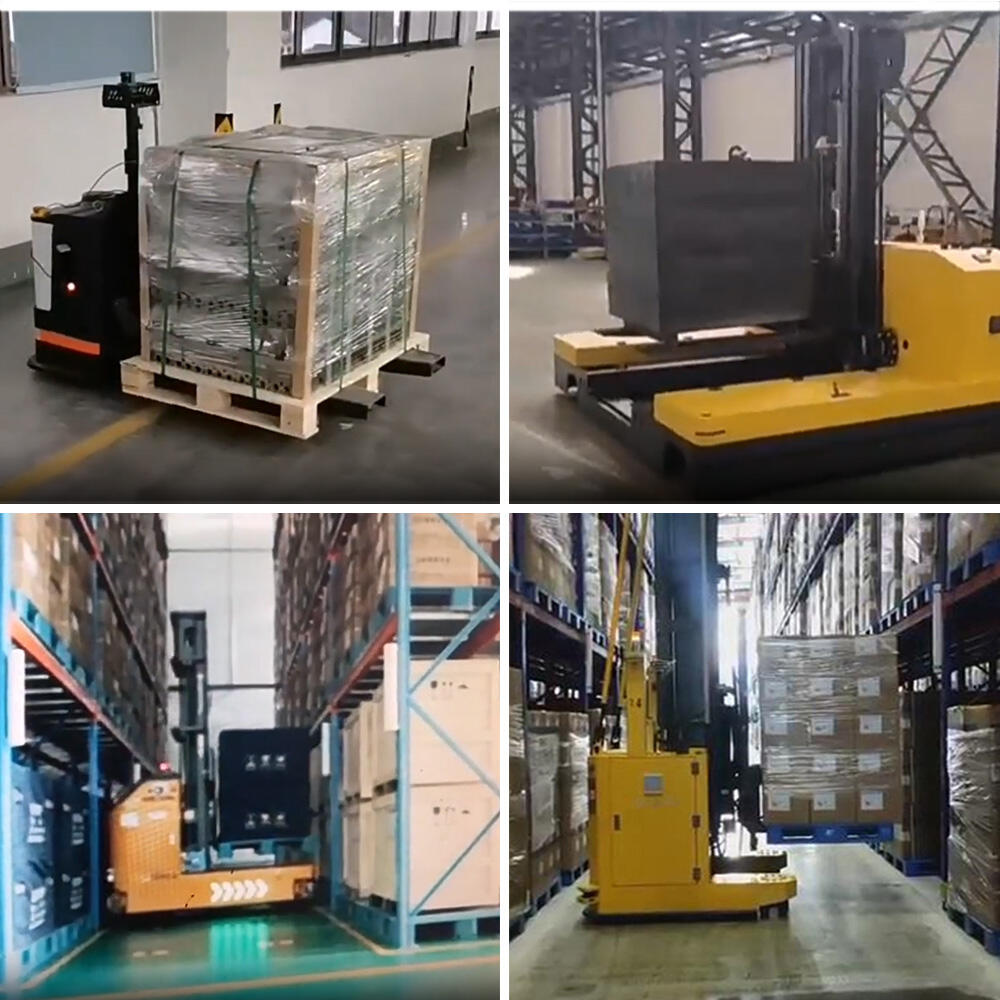
Laser-Stapler-Fahrzeug AGV, mit einer Last von 2000KG, kann bis zu 6000MM heben. Auf Basis der Daten, die von LiDAR-Sensoren erhalten werden, wird der SLAM-Algorithmus zur Erstellung von Karten sowie zur Durchführung von Positionierungs- und Navigationsfunktionen während der Bewegung des Roboters verwendet. Die fortschrittliche Lasernavigation erfordert keine Markierungen auf dem Boden oder reflektierenden Paneelen. Der Roboter kann während seiner Bewegung automatisch Hindernisse erkennen/vermeiden, Waren einlagern und sie an vorgesehenen Orten abstellen. Mit autarker Lade-Funktion ausgestattet. Der Roboter verfügt über mehrere Sicherheitsschutzstrategien in Bezug auf Software und Hardware und ist mit Sicherheitskontakte und Notaus-Tasten umgeben, um die Gesamt-Sicherheit und -Stabilität zu gewährleisten.
| Eigenschaften | Leistungstyp | Elektrisch | |
| Fahrzeugtyp | Automatisch | ||
| NAVIGATIONSART | Laser | ||
| Nennlast | Q (kg) | 2000 | |
| Lastzentrum | C (mm) | 600 | |
| Lastentfernung | X (mm) | 550 | |
| Radstand | Y (mm) | 1180 | |
| Antriebsradsgröße | (mm) | φ250*85 | |
| Hilfsradsgröße | (mm) | φ210*70 | |
| Spurweite vorne | b11 (mm) | 2050 | |
| Größe | Gesamte Höhe | h1 (mm) | 2800 |
| Hebehöhe | h3 (mm) | 6000 | |
| Gabelhöhe (bei niedrigster Stellung) | h13 (mm) | 60 | |
| Gesamtlänge | L1 (mm) | 2800 | |
| Fahrzeuglänge | L2 (mm) | 540 | |
| Gesamtbreite | b1 (mm) | 1700 | |
| Forkgröße | s/e/l (mm) | 45X140X1150 | |
| Gabel Außenbreite | b5 (mm) | 280/750 | |
| Gabelverstellung | L4 (mm) | 1200 | |
| Minimale Bodenfreiheit | m2(mm) | 60 | |
| Rechter Winkel, Stauraum Breite, Tablett 1000x1200mm | Ast(mm) | 1960 | |
| Wendekreis | Wa(mm) | 1600 | |
| Leistung | Fahrgeschwindigkeit ohne Ladung/voll beladen | km/h | 7/8 |
| Hebungsgeschwindigkeit ohne Ladung/voll beladen | mm/s | 120/190 | |
| Senkungsgeschwindigkeit ohne Ladung/voll beladen | mm/s | 190/170 | |
| Vorwärtsgeschwindigkeit | mm/s | 100/100 | |
| Maximale Steigleistung leer/voll beladen | % | 3/3 | |
| Bremsmethode | Elektromagnetische Bremse | ||
| Motor | Antriebsleistung des Motors | kW | 1*2 |
| Lenkmotorleistung | kW | 0.4*3 | |
| Hebewerkmotorleistung | kW | 8.6 | |
| Lithium-Batterie Spannung/Akapazität | V/ah | 48/210 | |
| Lithium-Batteriegewicht | kg | 150 | |
| Steuerungsmodus | Elektronisches Lenken | ||
1. Verteilung von Werkstattmaterialien, Reduzierung der Werkstattgangoperatoren und Schaffung einer umweltfreundlichen Chemiefabrik.
2. Stapelung der Fabriklager macht das Lagern standardisierter und ordentlicher, wodurch die Raumnutzung und den Transporteffizienz vollständig verbessert werden.






Ein professionelles Unternehmen, das sich mit dem Design, der Fertigung und dem Verkauf von Hebewerkzeugen und Energiesystemen beschäftigt.
 EN
EN
 AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 SQ
SQ
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 BN
BN
 MN
MN
 KK
KK
 KY
KY






